



Line Following Robot without using Microcontroller Kit Price in Pakistan | AmpFlick
₨3,000.00
Delivered All over Pakistan 🇵🇰
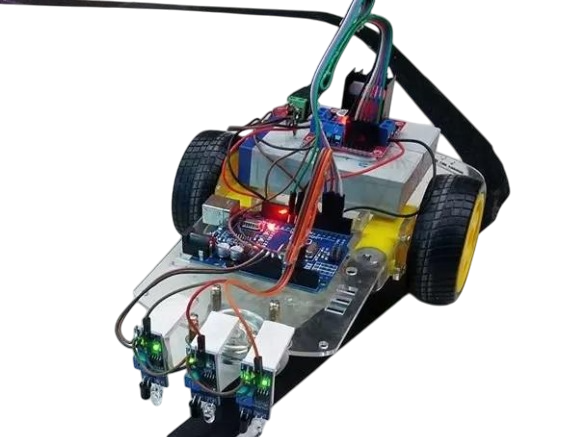
The Line Following Robot without using Microcontroller relies on analog comparator logic. It utilizes the LM358 IC to process signals from infrared sensors. When the sensors detect a white surface, the L293D driver activates the wheels. Conversely, black surfaces absorb light, causing the respective motor to stop. This creates a steering effect that keeps the robot on track
Description
Technical Specifications of Line Following Robot without using Microcontroller
-
Logic Controller: LM358 Dual Operational Amplifier acting as a voltage comparator.
-
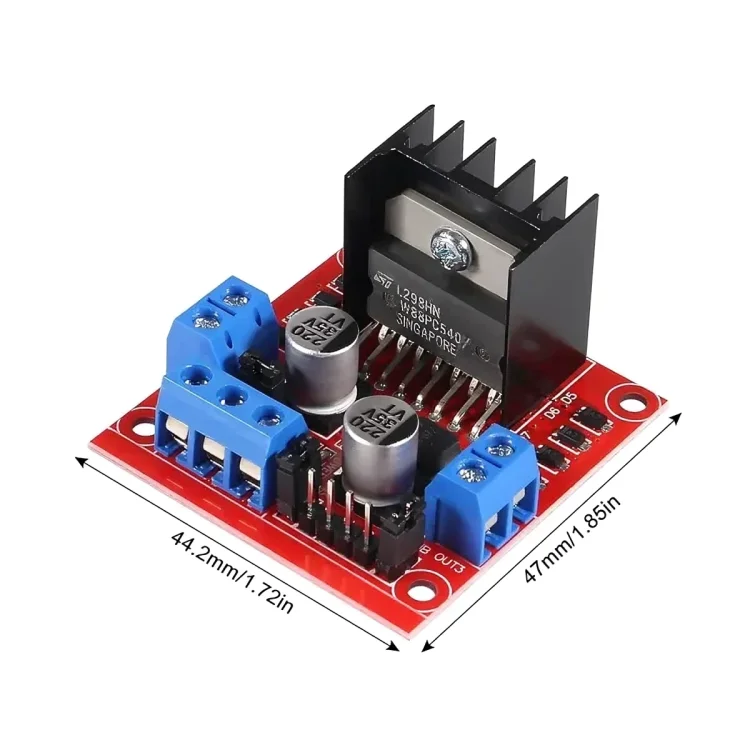
Motor Driver: L293D High-current integrated circuit for bidirectional motor control.
-
Sensor Type: Dual Infrared (IR) transmitter and receiver pairs for surface detection.
-
Drive System: Two high-torque BO motors with corresponding 65mm rubber wheels.
-
Power Source: 9V DC input via standard battery clips.
-
Sensitivity Control: Integrated 10kΩ variable resistors for threshold calibration.
-
Chassis Material: Lightweight and durable pre-drilled robot frame.
Usage and Hardware Calibration
-
First, assemble the robot chassis and mount the BO motors securely.
-
Next, wire the IR sensors to the LM358 comparator inputs.
-
Then, connect the comparator outputs to the L293D motor driver pins.
-
Afterward, adjust the variable resistors to distinguish between black and white surfaces.
-
Consequently, the Line Following Robot without using Microcontroller moves when sensors detect reflected light.
-
Finally, place the robot on a black track to begin autonomous navigation.
Advantages and Disadvantages
-
Pros: This kit teaches pure analog logic without complex programming requirements.
-
Furthermore, the lack of software ensures instant response times during operation.
-
Cons: The robot cannot perform advanced tasks like maze solving or speed ramp-ups.
-
Additionally, analog sensors are highly sensitive to ambient lighting conditions.
Precautions and What to Avoid
-
Warning: Do not mix up the IR LED and photodiode polarities.
-
Avoid running the motors on high-friction surfaces like thick carpets.
-
Never short-circuit the L293D pins to avoid permanent chip damage.
What is Included in the Package
-
1x LM358 IC and 1x L293D Motor Driver IC.
-
2x IR LED pairs and 2x BO Motors with Wheels.
-
2x 10kΩ Potentiometers and 1x Robot Chassis.
-
2x 9V Battery Clips and necessary resistors/LEDs.
-
1x Perfboard and a bundle of connecting wires.
AND PLEASE NOTE THAT ALL COMPONENTS ARE UN-ASSEMBELED. You have to assemble the kit your self.
Tutorial on how to assemble this: Click Here
Order more kits from AmpFlick: Click Here
🔗 Connect with the Ampflick Community
Stay updated with the latest hardware arrivals, project ideas, and engineering mentorship in Pakistan!
-
-
Instagram: @Ampflick — Daily project reels & hardware fashion.
-
LinkedIn: Ampflick Tech — Professional networking & career opportunities.
-
WhatsApp Support: Link to WhatsApp — Technical queries and bulk orders.
-
YouTube: Ampflick Official — Hardware masterclasses.
-
Only logged in customers who have purchased this product may leave a review.
Related products
-


-
2 Cell Holder
- ₨120.00
- Add to cart
-
-
-
L293 D Motor Driver
- ₨500.00
- Add to cart
-


Reviews
There are no reviews yet.